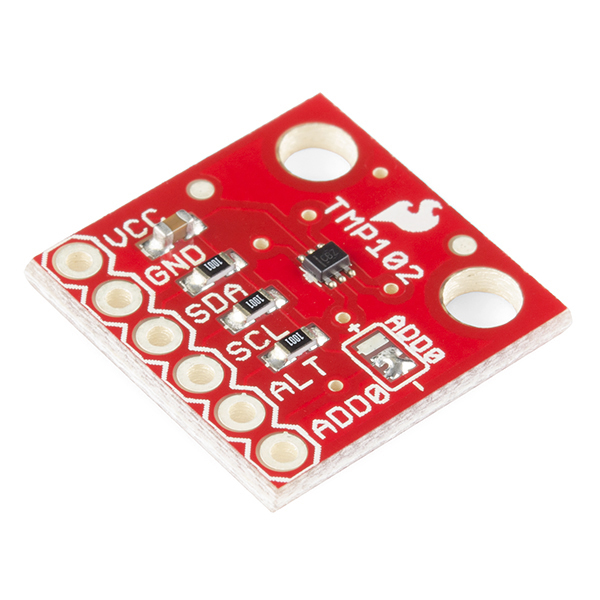
In order to measure magnetic field strength, we included a magnetometer in the payload. We used Honeywell's HMC5883L triple-axis magnetometer (pictured below), available for about fifteen dollars at the sparkfun website.

We calibrated the sensor using localized, real-time Earth magnetic field data that is made public by the National Geophysical Data Center (NGDC) and National Oceanic and Atmospheric Association (NOAA). To calibrate and test the magnetometer, we took "actual" values from their website which provides accurate magnetic fields vectors by location. The website is:
http://www.ngdc.noaa.gov/geomag-web
It turns out that the expected 'half a gauss' of magnetic field strength one typically encounters on Earth point primarily in the vertical direction. We calibrated the output corresponding to each (orthogonal and cartesian) magnetometer axis, so that when aligned vertically, it would agree with the actual vertical Earth magnetic field strength obtained from the aforementioned website. Physically and mathematically, we followed the same basic procedure we used to calibrate and test the accelerometer.
We formed a calibration curve for each (x, y, and z) magnetic field direction by interpolating from expected values corresponding to each analogRead output (summarized in the table below) from the sensor.
We calibrated the sensor using localized, real-time Earth magnetic field data that is made public by the National Geophysical Data Center (NGDC) and National Oceanic and Atmospheric Association (NOAA). To calibrate and test the magnetometer, we took "actual" values from their website which provides accurate magnetic fields vectors by location. The website is:
http://www.ngdc.noaa.gov/geomag-web
It turns out that the expected 'half a gauss' of magnetic field strength one typically encounters on Earth point primarily in the vertical direction. We calibrated the output corresponding to each (orthogonal and cartesian) magnetometer axis, so that when aligned vertically, it would agree with the actual vertical Earth magnetic field strength obtained from the aforementioned website. Physically and mathematically, we followed the same basic procedure we used to calibrate and test the accelerometer.
We formed a calibration curve for each (x, y, and z) magnetic field direction by interpolating from expected values corresponding to each analogRead output (summarized in the table below) from the sensor.
Actual Magnetic Field Strength (nT)
|
xRead
|
yRead
|
zRead
|
+50.6
|
-382
|
-546
|
-421
|
-50.6
|
479
|
278
|
323
|
For each (x, y, z) direction, two points were used to form the following linear calibration curves which calculate magnetic field strength from the Arduino software's analogRead commands.